
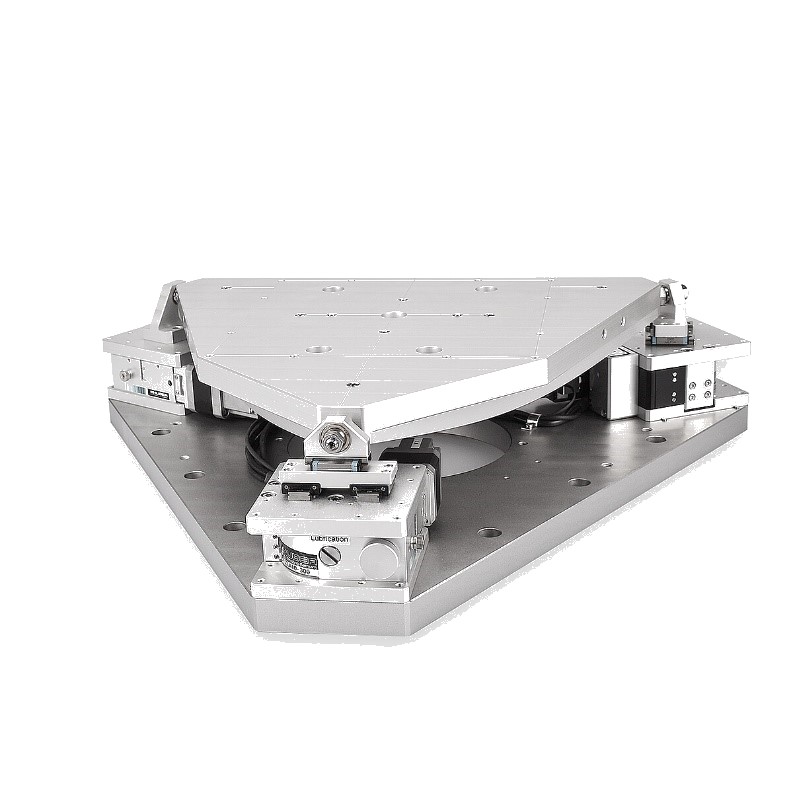
X-Pods
Tripods are realized as serial- our Quadropods as parallel kinematic systems. The latter have in contrast to the serial kinematic systems closed kinematic chains. All individual axis movements have to be synchronized and result in one total movement.
The positioning of the serial kinematic systems requires a synchronisation as well but the movements are independend from each other and can be actuated one after the other.
Characteristic Tripod
- 3-degrees of freedom (Rx/Ry/Z)
- complex motor controller not required
- can be realized without encoder controlling
- high stiffnes and load carrying capacity
Characteristic Quadropod
- 6-degrees of freedom (X/Y/Z/Rx/Ry/Rz)
- reduced height in comparison to Hexapods
- centre of rotation is freely definable
- input of absolute position- and angle values
- increased drive power due to parallel orientated drive systems
- high stiffnes and load carrying capacity